À l’heure où l’industrie automobile entre dans l’avenir de la mobilité, ses entreprises sont confrontées au défi de construire des véhicules offrant plus de commodité, de sécurité et de connectivité. L’avènement des véhicules autonomes (VA) et des véhicules définis par logiciel (SDV, pour software-defined vehicles ) ne devrait qu’amplifier cette tendance, accroissant encore la complexité des véhicules. Les VA, en particulier, nécessiteront des composants de pointe très divers – tels que des logiciels, des puces électroniques à semi-conducteurs, des capteurs et des câbles électriques –, ce qui en fera les véhicules les plus sophistiqués jamais produits.
La complexité des VA en tant que systèmes de systèmes sera certainement immense. Pourtant, la vérification et la validation de leur sécurité, de leur fiabilité et de leur performance dans tous les scénarios de circulation pourraient s’avérer une tâche encore plus ardue. Les projections indiquent qu’afin de garantir la sécurité et la fiabilité des plates-formes de VA celles-ci devront être soumises à des essais équivalant à plusieurs milliards de kilomètres.
L’un des défis majeurs pour les fabricants de VA sera donc de développer des méthodes de vérification et de validation permettant d’évaluer rapidement les performances de ces véhicules sophistiqués dans toutes sortes de scénarios de circulation et de conditions météorologiques.
L’augmentation de la complexité exige la fusion du réel et du virtuel
La complexité croissante du processus de développement d’un véhicule s’accroît lorsqu’il s’agit de vérifier et valider un véhicule autonome. Les projections indiquent qu’afin de garantir la sécurité et la fiabilité des plates-formes de VA celles-ci devront être soumises à des essais équivalant à plusieurs milliards de kilomètres. Un volume d’essais aussi considérable est nécessaire pour étudier les conditions de trafic inhabituelles difficiles à prévoir lors du développement d’un système de conduite autonome.
Les essais en conditions réelles doivent être complétés par des simulations haute-fidélité qui peuvent aider les équipes de conception à recueillir des informations essentielles plus rapidement et à moindre coût. Grâce à une approche associant essais en conditions réelles et simulation, les équipes d’ingénierie peuvent détecter les cas limites sur la route et évaluer plus vite et de façon plus économique le comportement du véhicule dans tous les scénarios de circulation.
Mettre en œuvre une telle approche combinant le réel et le virtuel nécessite une plate-forme de développement de VA intégrée capable de tester et retester le fonctionnement du véhicule dans des scénarios virtuels réalistes pendant tout le processus de conception. Une telle plate-forme intégrée de conception et de simulation permet de réinjecter les résultats des tests et les données de simulation dans le processus de conception du véhicule, créant ainsi un système en boucle fermée qui améliore la conception, le fonctionnement et les caractéristiques physiques du système grâce à des données haute-fidélité.
Pour construire une plate-forme de ce type, il faut adopter une approche de numérisation étendue qui soutient la création d’un jumeau numérique complet du VA, couvrant la conception, la vérification et la validation, la surveillance sur le terrain et l’optimisation du matériel, du logiciel, de la production et du cycle de vie du véhicule.
La numérisation permet une approche de simulation combinée
Le développement de systèmes avancés d’aide à la conduite (ADAS) et de véhicules autonomes est un processus d’ingénierie basé sur les données. Grâce au jumeau numérique complet, de grandes quantités de données sont générées, analysées et réinjectées dans le processus de conception à chaque étape du cycle de vie. C’est la capacité à traduire les données brutes collectées en informations techniques permettant d’améliorer et optimiser les conceptions qui fait la différence et permet d’obtenir des avantages concurrentiels.
Tout commence par la collecte de données dans le monde réel. Généralement, la quantité de données collectées lors d’un essai physique est énorme. Les solutions de collecte de données numérisées incluent des logiciels capables d’effectuer une première analyse des données, de distinguer celles qui sont pertinentes pour l’objectif de l’essai considéré, et de permettre aux équipes de prendre des décisions éclairées concernant les priorités de stockage et de traitement des données.

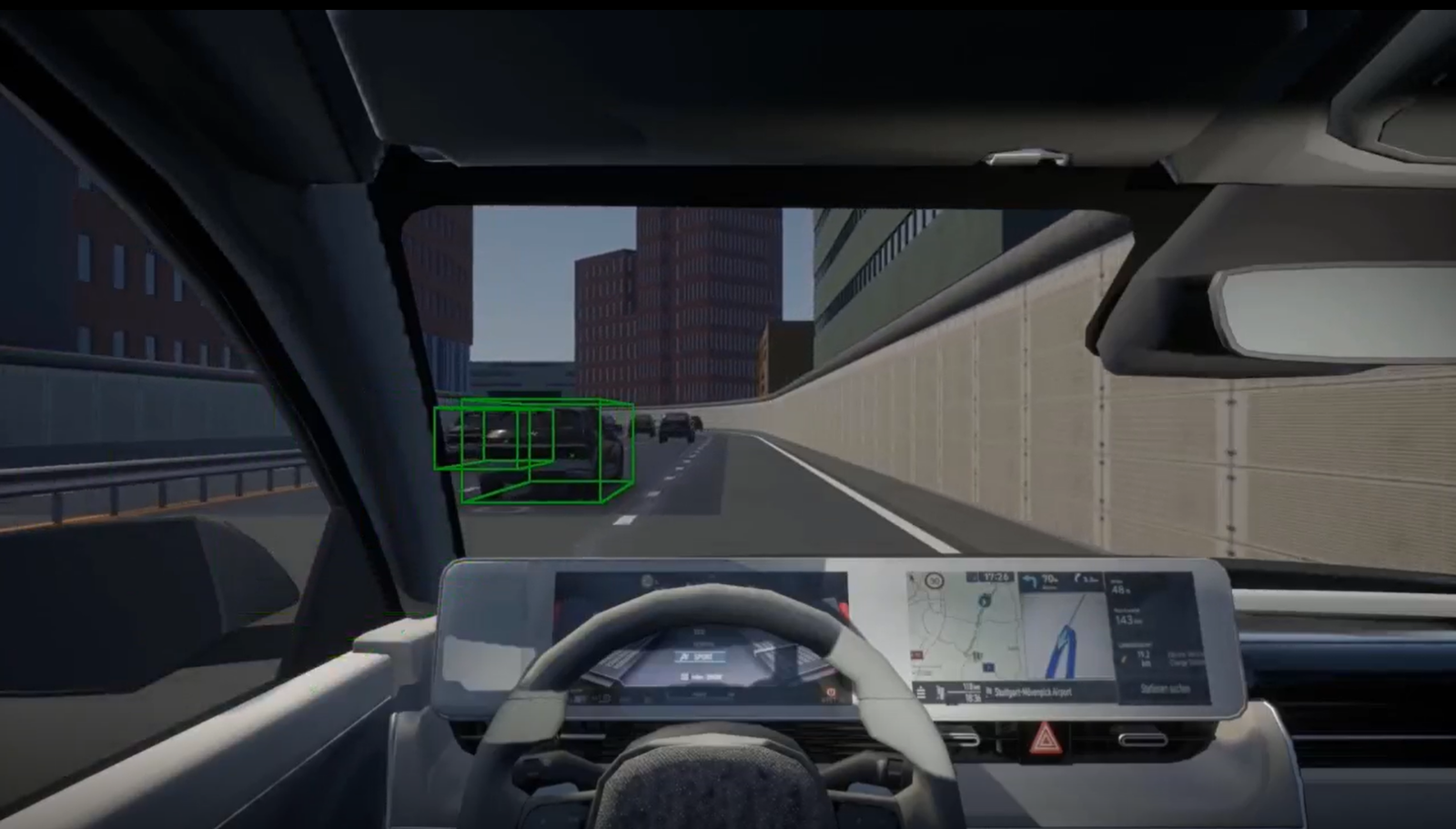
Les données recueillies dans le monde réel peuvent servir à améliorer la fidélité des essais simulés et permettre aux ingénieurs d’étudier et améliorer les scénarios de circulation. (Crédit image : Siemens)
Les données collectées deviennent encore plus puissantes une fois converties dans le domaine virtuel. Les données d’essais en conditions réelles peuvent enrichir les environnements routiers simulés et la dynamique de conduite, ce qui permet d’obtenir un jumeau numérique beaucoup plus fidèle. Les scénarios capturés lors des essais en conditions réelles peuvent également être importés et recréés dans une solution de simulation. Lorsqu’un scénario a été intégré dans l’environnement de simulation, l’équipe d’ingénierie peut modifier tous ses paramètres, tels que les conditions météorologiques ou la vitesse du véhicule, ce qui permet d’étudier tous les aspects du comportement du système.
Les simulations haute-fidélité du jumeau numérique complet d’un véhicule constituent également le meilleur environnement pour la découverte des scénarios dangereux imprévus ( unknown-unsafe ). Les équipes d’ingénierie peuvent utiliser les connaissances tirées de situations réelles connues en combinaison avec des méthodes mathématiques pour découvrir d’autres scénarios critiques. Dans l’environnement virtuel, les équipes peuvent découvrir et analyser ces scénarios de manière beaucoup plus efficiente, ce qui réduit le nombre de scénarios dangereux imprévus et donc le risque encouru lors de la mise en œuvre des systèmes de VA.
Construire l’avenir de la mobilité grâce à la numérisation
Le succès de la mise en œuvre des systèmes de conduite automatisée repose en grande partie sur notre capacité à relever l’immense défi de la vérification et de la validation des véhicules électriques. Les VA devront fonctionner de manière sûre et fiable quelles que soient les conditions météorologiques et de circulation, et dans des environnements urbains, suburbains et ruraux. Les constructeurs de VA et les entreprises de transport devront adopter le jumeau numérique complet afin de mettre en place une approche numérique utilisant la réalité mixte pour le développement, la vérification et la validation de leurs systèmes.
Alors que notre vision futuriste de moyens de transport automatisés devient peu à peu réalité, les entreprises du secteur de l’automobile et des transports sont confrontées à la transformation de leurs méthodes de travail et des produits qu’elles créent. Si l’avenir est riche de possibilités, le chemin qui y mène comporte plusieurs obstacles. Les entreprises qui s’engagent dans la transformation numérique surmonteront ces obstacles et établiront une base solide pour l’avenir des véhicules connectés, automatisés et de plus en plus définis par logiciel.
À propos de l’auteur
 Nand Kochhar est vice-président en charge du secteur de l’automobile et des transports chez Siemens Digital Industries Software. Il a rejoint Siemens en 2020 après avoir passé près de 30 ans chez Ford Motor Company, où son dernier poste en date était celui d’ingénieur en chef des systèmes de sécurité pour le monde entier. À ce titre, il était responsable au niveau mondial des performances de tous les véhicules Ford et Lincoln en matière de sécurité. Il a également été responsable technique exécutif pour l’IAO et membre du comité technique consultatif de Ford. Au cours de son mandat chez Ford, Nand Kochhar a également occupé des fonctions de directeur de l’ingénierie dans différents domaines, tels que le développement de produits, la fabrication, la numérisation, ainsi que le développement et la mise en œuvre de technologies de simulation.
Nand Kochhar est vice-président en charge du secteur de l’automobile et des transports chez Siemens Digital Industries Software. Il a rejoint Siemens en 2020 après avoir passé près de 30 ans chez Ford Motor Company, où son dernier poste en date était celui d’ingénieur en chef des systèmes de sécurité pour le monde entier. À ce titre, il était responsable au niveau mondial des performances de tous les véhicules Ford et Lincoln en matière de sécurité. Il a également été responsable technique exécutif pour l’IAO et membre du comité technique consultatif de Ford. Au cours de son mandat chez Ford, Nand Kochhar a également occupé des fonctions de directeur de l’ingénierie dans différents domaines, tels que le développement de produits, la fabrication, la numérisation, ainsi que le développement et la mise en œuvre de technologies de simulation.



