Mike Santarini et Andrew Macleod
Aujourd’hui, une voiture de milieu de gamme inclut des centaines de systèmes électroniques, dont le nombre et la complexité augmentent à chaque nouvelle génération de véhicules. Ces systèmes ne doivent pas se contenter de fonctionner de façon extrêmement fiable sans aucune aide. Ils doivent tenir compte du contexte de l’ensemble du véhicule et être évolutifs pour suivre l’évolution vers les villes/autoroutes intelligentes et vers l’objectif final du Niveau 5 de conduite autonome, où les véhicules communiquent avec les autres véhicules (V2V) et avec l’infrastructure (V2I). Selon Akio Toyoda, président de Toyota (et petit-fils du fondateur de la société), il faudra 14,2 milliards de kilomètres de tests, notamment des simulations, pour prouver que les véhicules autonomes sont sûrs.
Combien de kilomètres votre voiture a-t-elle au compteur ?
Les équipementiers et constructeurs automobiles doivent tester ces systèmes électroniques à tous les niveaux (composant, ECU/système et système de systèmes du véhicule) avant de les déployer. Le problème gagne en complexité si vous prenez en compte les nombreuses configurations différentes qu’un fabricant propose dans ses gammes de produits et de l’emplacement des systèmes dans un véhicule (souvent à proximité du bloc-moteur ou d’un élément qui vibre). La nécessité de tester tous les systèmes automobiles dans chaque condition de conduite possible, notamment des conditions météorologiques variées, extrêmes et même différents styles de conduite, complique encore les choses. Enfin, il faut aussi tester ces systèmes dans le contexte des connexions avec les autres véhicules et l’infrastructure. Par conséquent, comment s’assurer que ces systèmes font l’objet d’une validation suffisante ?
Modélisation des capteurs
Commençons par les capteurs, qui font partie des systèmes les plus importants pour la conduite autonome. Les voitures autonomes requièrent un vaste éventail de capteurs qui leur servent d’yeux et d’oreilles. Aujourd’hui, un véhicule normal (non-autonome, éventuellement équipé d’une poignée de fonctions d’aide à la conduite) compte entre 60 et 100 capteurs embarqués. Ce chiffre ne fera qu’augmenter à mesure que les voitures deviendront « plus intelligentes ».
Dans la mesure où un seul type de capteurs ne peut pas répondre à toutes les exigences de fonctionnalités dans toutes les conditions météorologiques et de luminosité (voir Figure 1), la majorité des entreprises ont recours à un mélange de capteurs pour créer une vision à 360 degrés autour du véhicule.
Le LIDAR utilise la lumière sous la forme d’un laser pulsé pour mesurer les distances avec une extrême précision. Un radar permet de détecter et de suivre des objets, par exemple d’appréhender la vitesse et la direction de la voiture, ainsi que l’angle relatif des objets. Même si un radar ne fournit pas la granularité d’un LIDAR, il est complémentaire en fonctionnant bien dans de mauvaises conditions météorologiques. Pour la conduite autonome, vous avez vraiment besoin des deux. (Dans ce domaine, Elon Musk est un cas unique, puisqu’il défend l’autonomie complète chez Tesla avec seulement des capteurs caméras, radars et à ultrasons.)
Les capteurs caméras servent à recueillir les informations de texture, de couleur et de contraste nécessaires à la reconnaissance de l’image. Les caméras représentent la principale technologie employée pour la classification des objets, à la fois à l’intérieur et à l’extérieur du véhicule. Plusieurs fabricants utilisent des caméras avec radar (mais pas de LIDAR) dans leurs voitures autonomes.

Les objectifs de conception des systèmes LIDAR, des radars et des caméras portent largement sur la diminution de la taille et du coût sans sacrifier les exigences de résolution et de portée nécessaires à la mise en œuvre de différents niveaux d’autonomie des véhicules. En outre, lorsqu’ils sont intégrés, ces capteurs doivent fonctionner de façon fiable dans un environnement automobile et dans toutes les conditions météorologiques.
Néanmoins, certains objectifs de conception comme la diminution de taille et la consolidation des fonctionnalités de traitement du signal pourraient entraîner une accumulation de chaleur préjudiciable aux performances et à la fiabilité des capteurs.
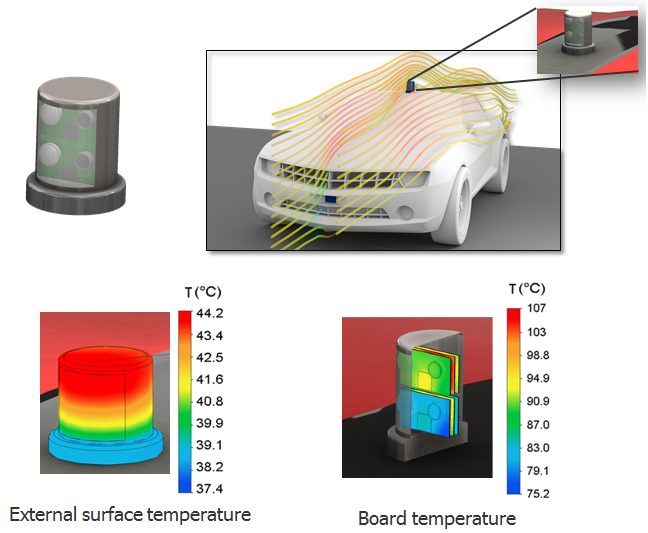
Pour parvenir à réduire la taille (et le coût) sans compromettre la durée de vie des capteurs en raison d’accumulations de chaleur localisées non souhaitées, la conception des composants électroniques des capteurs et de leurs boîtiers doit prendre en compte les contraintes thermiques et leur emplacement dans le véhicule. La Figure 2 montre la nécessité d’une simulation thermique fiable du LIDAR du véhicule autonome et de prendre en compte l’emplacement d’intégration dès le début de la phase de conception/prototypage.
L’intégration de LIDAR à semi-conducteurs dans les phares peut également créer de nouveaux défis pour l’empreinte thermique du LIDAR et avoir un impact sur les performances du LIDAR en cas de brouillard ou de verglas. Avec la possibilité de simuler des modèles de phare, l’outil FloEFD™, qui fait partie du portefeuille de produits Mentor de Siemens, permet aux fournisseurs de LIDAR et de phares de résoudre ces questions spécifiques uniques.
De la même façon, pour les capteurs de vision, en particulier les caméras, l’accumulation de chaleur peut entraîner l’assombrissement des pixels et donc une image de mauvaise qualité. Le besoin accru de traitement du signal sur les composants électroniques multifonctions peut se traduire par une augmentation de la température qui pourrait encore avoir des répercussions sur la consommation d’énergie. Au final, cela pourrait nuire à la qualité et à la fiabilité des données des capteurs.
En raison de leur fonction essentielle pour les véhicules autonomes, la conception des composants électroniques des capteurs doit également garantir l’intégrité du signal. Les interférences électromagnétiques représentent un défi de taille pour le radar. Ensemble, les solutions HyperLynx® et Xpedition® AMS de Mentor (qui font également partie de l’environnement de développement de véhicules autonomes de Siemens) permettent aux ingénieurs de concevoir les composants électroniques en tenant compte des contraintes d’intégrité de puissance et de compatibilité électromagnétique. Grâce à ces outils, les équipes de conception peuvent optimiser la structure des bus de l’ECU et la fréquence des signaux afin de garantir la compatibilité électromagnétique (CEM).
Comme nous l’avons déjà mentionné, toutes ces technologies de capteurs sont nécessaires à la conduite autonome. Mais en plus de la vitesse des objets et de la distance entre eux, les véhicules intelligents doivent choisir le trajet le plus économe en énergie et le plus sûr vers leur destination. Cela nous amène à des considérations sur le traitement des données et sur la façon dont ces systèmes sont connectés et testés dans le contexte d’un plus grand nombre de véhicules et des nombreux environnements dans lesquels ils seront amenés à fonctionner.
Modélisation de l’environnement et des scénarios de trafic
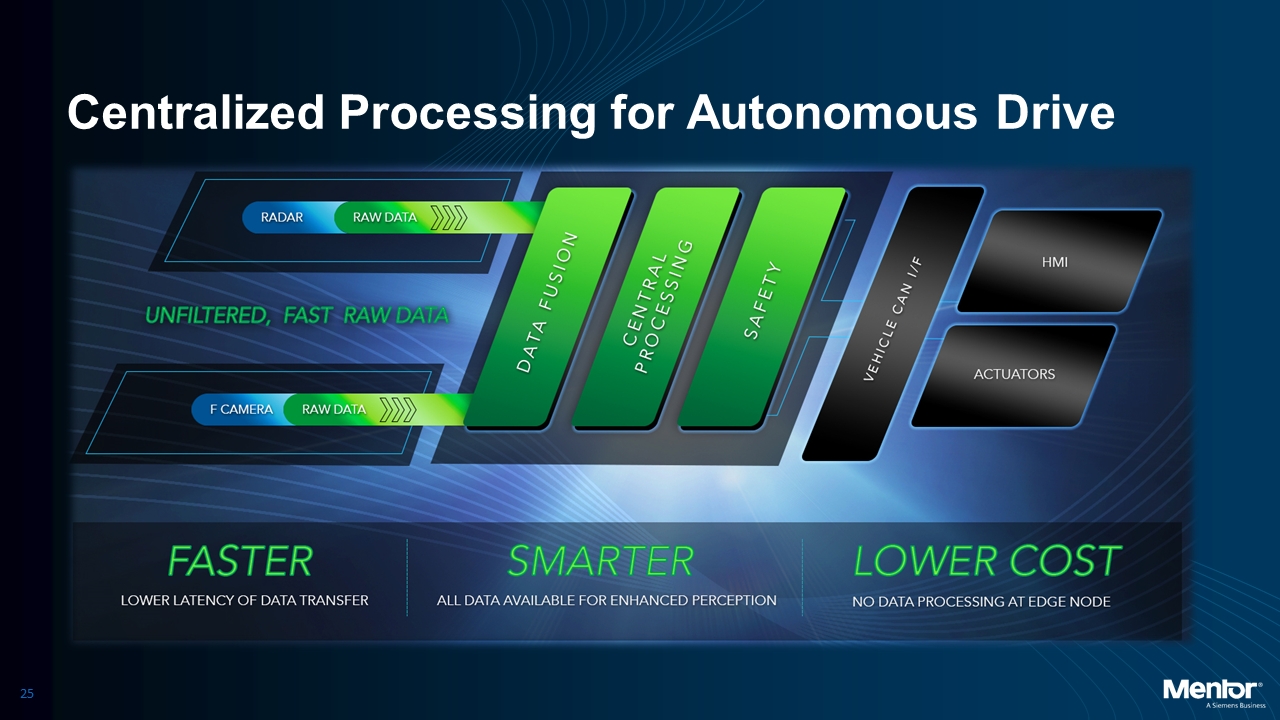
Actuellement, de nombreux véhicules avec fonctions d’aide à la conduite utilisent des calculateurs relativement simples fonctionnant à des fréquences d’horloge basses et avec une mémoire limitée pour exécuter un code relativement simple. La plupart des modules de capteurs contiennent des processeurs 8-16 bits qui effectuent des calculs sur les données brutes avant de transmettre ces données traitées à des systèmes de pointe (contrôle de collision, régulateur de vitesse, etc.). Ce type d’architecture distribuée dans laquelle le traitement des données se produit à chaque capteur est problématique, car elle introduit de la latence pendant le transfert d’informations essentielles à la sécurité, augmente le coût et la consommation d’énergie.
Citant le fournisseur de groupes motopropulseurs Borg Warner Inc., un article de Bloomberg datant du 11 octobre notait que « la conduite autonome implique une énorme consommation d’énergie. Certains prototypes totalement autonomes actuels consomment entre deux et quatre kilowatts d’électricité, soit l’équivalent de 50 à 100 ordinateurs portables fonctionnant en continu dans le coffre ».
Par conséquent, une telle consommation d’énergie et la complexité globale des systèmes rendent les architectures distribuées inefficaces et ne leur permettent pas d’évoluer pour atteindre le Niveau 5 de conduite autonome.
La plupart des experts sont d’accord sur le fait que lorsque les véhicules de Niveau 5 arriveront en masse, les ressources informatiques offriront en général à tous les systèmes essentiels à la conduite automatisée un accès au même ensemble de données complet. C’est justement ce que fait l’approche adoptée par Siemens. DRS 360, plate-forme de conduite autonome faisant partie du portefeuille Mentor, rassemble les données des capteurs, qui arrivent dans différents types/formats (2D, 3D, ADC, etc.) et à diverses fréquences d’image, dans une même vue synchronisée au niveau du temps et de l’espace de l’environnement proche de la voiture. Cette vue inclut des informations sur la position, la vitesse et les objets situés à proximité (voir Figure 3). L’efficacité de ce logiciel, pour lequel plus d’une douzaine de brevets a été obtenue, est soutenue par l’application des réseaux neuronaux, qui plafonne la consommation à 100 watts, voire moins.
Un système centralisé améliore également l’émulation pour les fabricants qui développent les prototypes et les unités de production. La plate-forme de Siemens pourrait en outre s’avérer utile pour les nombreuses simulations requises pour tester les capteurs indispensables à la conduite autonome, de manière conjointe ou individuelle.
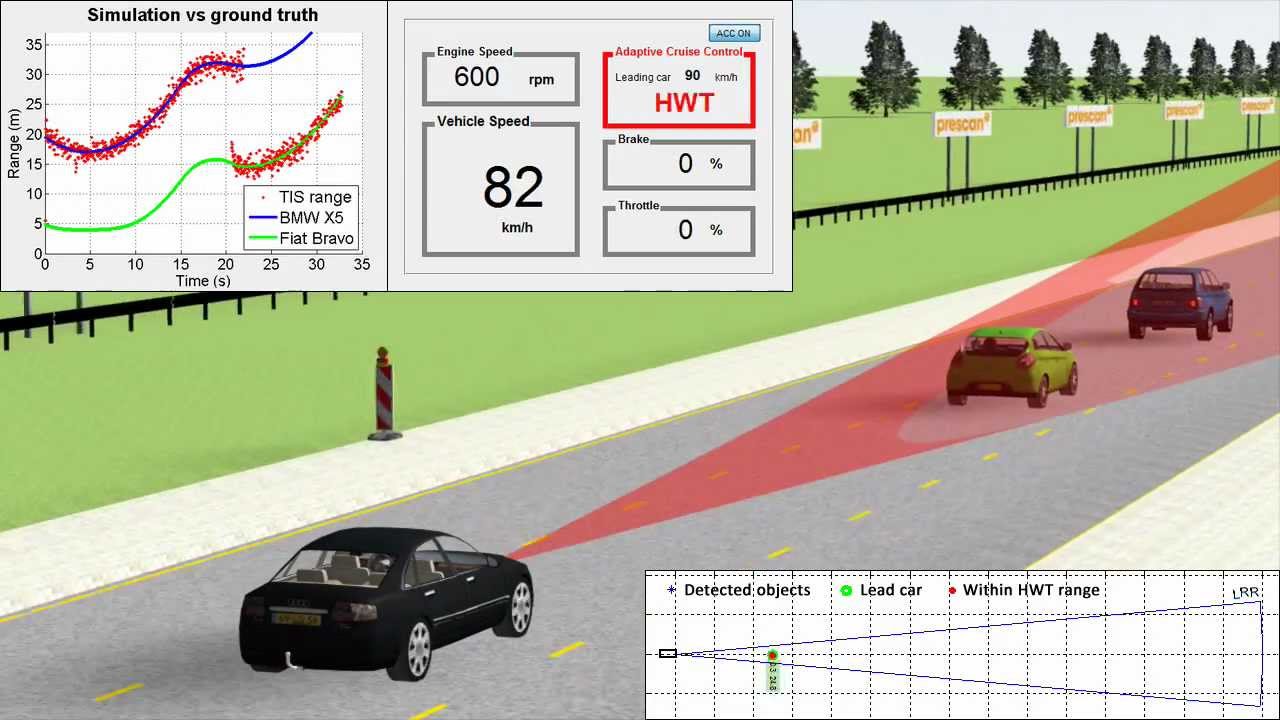
Ce système intelligent utilisant la fusion de capteurs devra être testé dans des scénarios réels. Autre produit de l’environnement de développement de véhicules autonomes de Siemens, l’environnement TASS International PreScan permet aux clients de simuler divers scénarios de conduite auquel le système de capteurs fera face, mais aussi de tester et d’améliorer le système de capteurs jusqu’à ce qu’il soit fiable, avec l’aide de la plate-forme DRS 360. L’offre de simulation PreScan-DRS 360 a été annoncée au printemps 2018.
PreScan produit des données de capteurs brutes simulées très réalistes, basées sur les propriétés physiques pour un nombre illimité de scénarios de conduite potentiels, de situations de trafic et d’autres paramètres (voir Figure 4). Les données provenant des capteurs LIDAR, radars et caméras simulés de PreScan sont ensuite transmises à la plate-forme DRS 360, où elles sont fusionnées en temps réel pour créer un modèle haute résolution de l’environnement du véhicule et des conditions de conduite.
Les équipes d’ingénieurs peuvent ensuite exploiter perception avec une résolution supérieure et le traitement hautes performances de la plate-forme DRS 360 pour tester et améliorer des algorithmes propriétaires pour des tâches essentielles comme la reconnaissance d’objets et la politique de conduite. Par la suite, cette combinaison d’outils sera associée à d’autres produits Siemens, en particulier les logiciels Teamcenter® et Polarion®, pour être utilisée dans des contextes élargis de gestion du cycle de vie des produits (PLM) et de gestion des exigences.
« Nous sommes persuadés que vous serez finalement en mesure d’expliquer 99,99999 % de tout ce qu’il se passe sur les routes », a déclaré Martijn Tideman, directeur des produits chez TASS International, société du groupe Siemens, à Design News, qui couvrait l’annonce de 2018.
À propos des auteurs Mike Santarini est directeur du marketing EDA chez Mentor, société Siemens, basé dans la Silicon Valley. Andrew Macleod est directeur du marketing automobile chez Mentor, basé à Austin (Texas).
Plus d’informations, cliquez-ici